





This is an old revision of the document!
Course: Robot Programming with Lisp
| Dauer | 2 SWS (4 ECTS) |
|---|---|
| Art | Kurs |
| Semester | WS 2015/16 |
| Vortragende | Gayane Kazhoyan, Prof. Michael Beetz |
| Sprache | Englisch / Deutsch |
| Termine | Dienstags, 14:15 - 15:45 |
| Veranstaltungsort | TAB-Gebäude (Am Fallturm 1), Eingang E, Raum: 1.63 (1. OG) |
| Bemerkungen | Veranstaltungsbeginn: 13.10.2015 |
{kind=link}
This course gives a solid practical introduction to the Lisp programming language up to advanced topics. The first half of the course covers the basics of functional programming, Artificial Intelligence techniques and modern robot programming. The second half involves programming on an autonomous robot platform similar to TurtleBot. The assignment is to be worked on independently in small groups. The task is similar for all the groups and the results of the project are assessed in a final competition.
Material
| Date | Topic | Material |
|---|---|---|
| 13.10.2015 | Introduction, Setup | 1_intro.pdf |
| 20.10.2015 | Imperative Programming in Lisp | 2_imperative.pdf |
| 27.10.2015 | Functional Programming | 3_functional.pdf |
| 03.11.2015 | Functional Programming II | 4_more_functional.pdf |
| 17.11.2015 | Macros, OOP, Failure Handling | 5_macros_oop.pdf |
| 24.11.2015 | Lisp namespaces, ASDF, ROS, roslisp | 6_packaging_ros.pdf |
| 01.12.2015 | Coordinate Systems, ROS actions | 7_more_ros.pdf |
| 08.12.2015 | Introduction to TortugaBot | |
| 15.12.2015 | Mapping | Building a map Mapping from bag files |
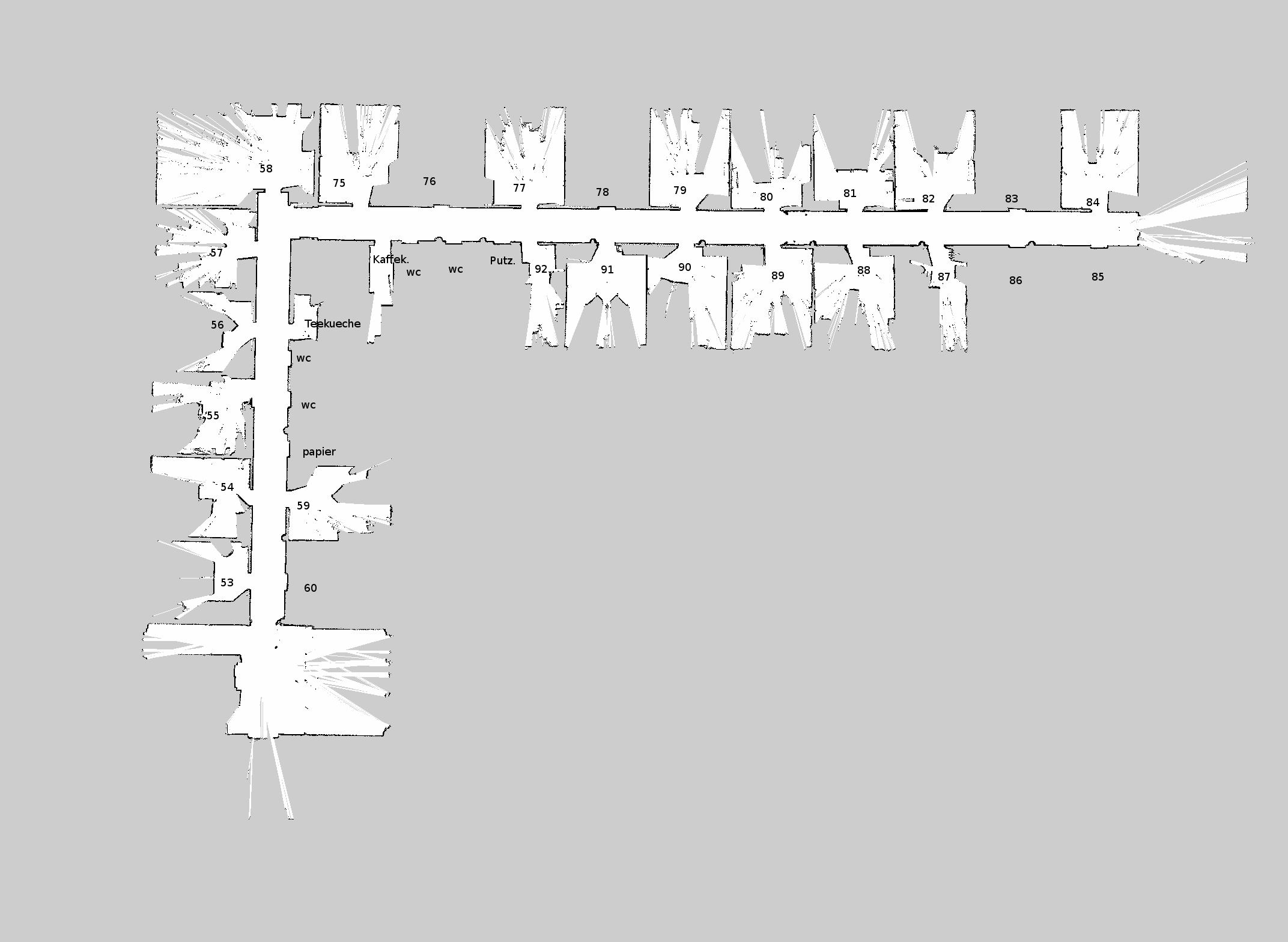
| 08.12.2015 | Navigation | move-base-actions.lisp.odt map_annotated.png roslisp tutorials Navigation Tuning Robot Setup Autonomous Navigation |
{kind=link}
Prof. Dr. hc. Michael Beetz PhD
Head of Institute
Contact via
Andrea Cowley
assistant to Prof. Beetz
ai-office@cs.uni-bremen.de
Discover our VRB for innovative and interactive research

Memberships and associations:
![]()
![]()

Social Media:

