Boxy
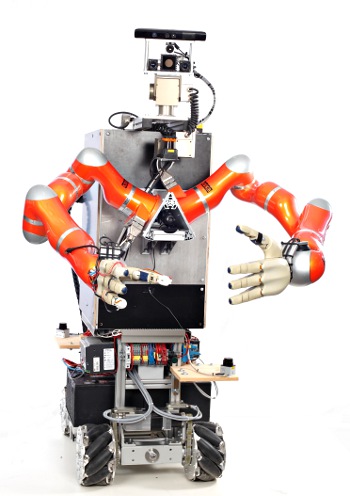 Boxy is our new omnidirectional dual-armed robot platform.
It is being built around a custom omnidirectional base and KUKA-lightweight LWR-4 arms. It is an upgraded version of TUM-Rosie, which was deployed in the Assistive Kitchen environment of the Intelligent Autonomous Systems Group (http://ias.cs.tum.edu). The main objective of the research performed on- and around the robot is to develop a system with the very high degree of cognition involved. The latter thus envisions a system that can intelligently perceive environments, reason about them, autonomously infer best plausible actions and in the end, also successfully execute them.
Boxy is our new omnidirectional dual-armed robot platform.
It is being built around a custom omnidirectional base and KUKA-lightweight LWR-4 arms. It is an upgraded version of TUM-Rosie, which was deployed in the Assistive Kitchen environment of the Intelligent Autonomous Systems Group (http://ias.cs.tum.edu). The main objective of the research performed on- and around the robot is to develop a system with the very high degree of cognition involved. The latter thus envisions a system that can intelligently perceive environments, reason about them, autonomously infer best plausible actions and in the end, also successfully execute them.
The robot's hardware include:
- KUKA LWR-4+ arms
- 2-DOF Pan-Tilt unit from Schunk
- Omnidirectional base, using mechanum wheels
- DLR-HIT Hands 2 (by Wessling Robotics)
- Movable torso
- Hokuyo laser scanners
- Kinect2
- Force torque sensor on the wrist of the arm (Weiss Robotics KMS40)
Following video demonstrates some of the so far developed capabilities: